Red Matter 2’s Pico 4 port runs at higher resolution than Quest 2. Its developer explained how that’s possible.
The Red Matter series is known for setting the standard for graphical fidelity on standalone VR headsets. In our review of the sequel, we described it as a stunning visual showcase more akin to a console title than what you’d expect from a mobile platform. Developer Vertical Robot achieved this by developing a custom version of Unreal Engine with shaders specifically designed for mobile VR.
Red Matter 2 also takes advantage of each headset’s specific strengths. On Quest Pro it was the first major title to add support for eye tracked foveated rendering, delivering a 30% boost in base resolution.
Vertical Robot announced Red Matter 2 is coming to Pico 4, with more than double the base resolution compared to Quest 2.
Quest 2 and Pico 4 both feature the Snapdragon XR2 Gen 1 chipset. Game developers set the CPU and GPU clock speed, up to a maximum, to balance performance and battery life. Quest 2 has a relatively weak cooling fan so its max GPU clock speed is slightly less than the chip’s maximum supported. But Pico 4 has a more powerful fan and larger vents, so the GPU can be clocked 20% higher than Quest 2.
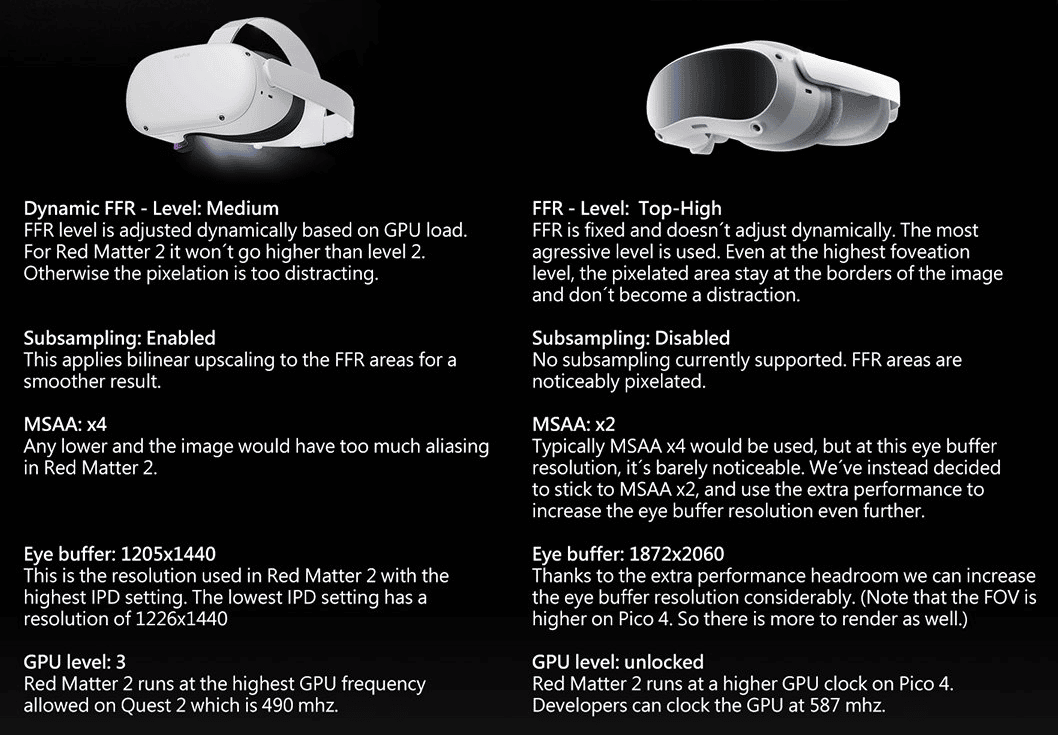
Red Matter 2 takes advantage of this higher GPU clock speed to run at a higher resolution. And when rendering at higher resolutions, aliasing becomes less apparent and thus anti-aliasing becomes less necessary. So while on Quest 2 4x MSAA is used, on Pico 4 Vertical Robot claims only 2x MSAA is needed. Further, Pico 4’s larger field of view means a more aggressive fixed foveated rendering (FFR) level can be used since the pixelation will be further from the center of the lens.
The combination of the higher GPU clock speed, lower anti-aliasing, and more aggressive FFR enables the Pico 4 port to run at 2.2x higher base resolution. What do we mean by “base” resolution? The “eye buffer” values shown in the infographic represent the dimensions of the output image for each eye, but FFR means the edges of the image are rendered at a lower pixel density than the center. The actual number of pixels rendered is thus lower than the eye buffer dimensions suggest.
Further, the actual angular resolution you’ll see in Pico 4 is not 2.2x higher, even in the center, because the pixels are more spread out over Pico 4’s larger field of view. It is still higher, but not double.
There are a few graphical downsides to the Pico 4 port, however. Firstly, Quest 2’s FFR is dynamic, meaning it only kicks in when needed, while Pico 4’s is active all the time. Further, Pico 4 doesn’t currently support subsampled layout, a rendering technique that reduces visual artifacts of FFR in the periphery. Vertical Robot said this means the edges of the lens are “noticeably pixelated”, but Pico 4’s larger field of view means these edges are further away from the center.
In my review of Pico 4, I noticed that some games that run smoothly on Quest 2 exhibited annoying frame drops on Pico 4. It’s possible those developers aren’t yet enabling the higher GPU clockspeed, or that Veritcal Robot’s custom shaders are just more scalable to higher resolutions than those used by other developers.